EXBus is a bi-directional serial transmission protocol from JETI Model, designed primarily for transmission information between a receiver and other devices connected to it. By updating the latest firmware, A3 Super 4 and A3 Mini can support EXBus now and allow you to connect the gyro to a Duplex receiver with one single wire. When operating in EXBus mode, the gyro works as a "Slave" device and will only parse the channel values from the receiver but never send any data to the receiver. EXBus supports either LowSpeed (125kb) or HighSpeed (250kb) communication speed, the gyro can recognize the line speed automatically and keep or switch the speed during the operation to ensure the security of data transmission.
Important Notes about Fail-Safe
According to the official technical documents and our tests, in case of a signal loss between a transmitter and a receiver, the receiver will not send any packets with the channel values to the devices connected to the bus, which would lead to failure of Fail-Safe function of the transmitter. To avoid this, the gyro will enter its fail safe mode in case of signal loss from the transmitter, the LED will keep flashing Red slowly and all servos will move to their initial positions at startup including the pass-through channels AUX1 and AUX2, so if you are using AUX1 or AUX2 for throttle, always ensure that the throttle stick is in the lowest position when power on the gyro. It's recommended to connect the throttle or servos directly to the receiver without passing through the gyro if you want to use the native fail-safe function of the receiver.Receiver Wiring
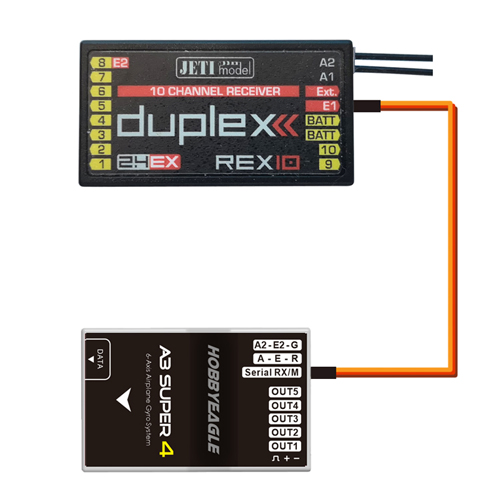
Connect the [Serial RX] of the gyro to the E1 or E2 output of the receiver with one single wire, as shown in the figure below.
Receiver Setting
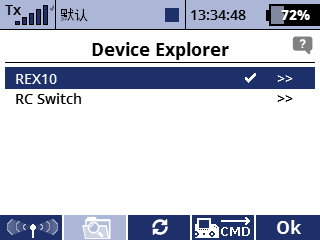
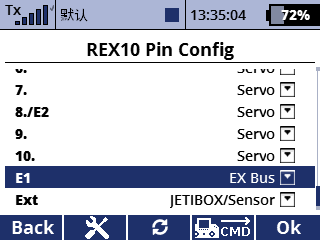
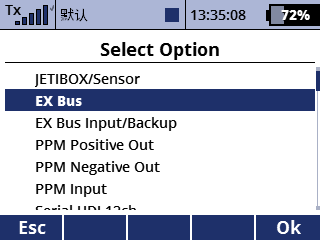
Configure the receiver pin E1 or E2 to EX Bus in the Device Explorer menu of the transmitter, as shown in the figure below.
Gyro Setting
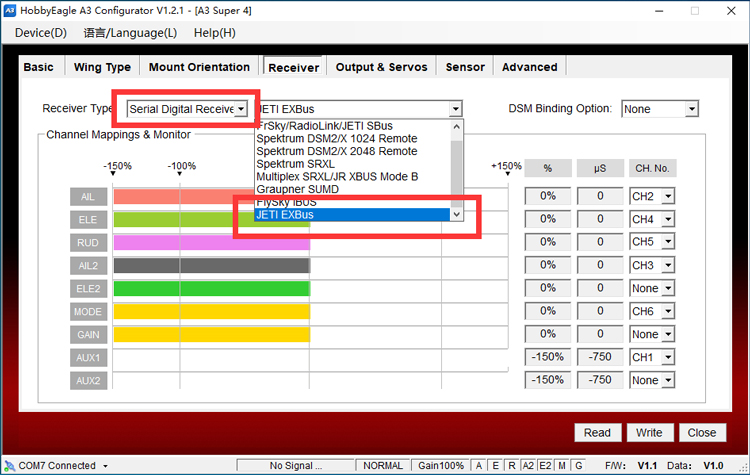
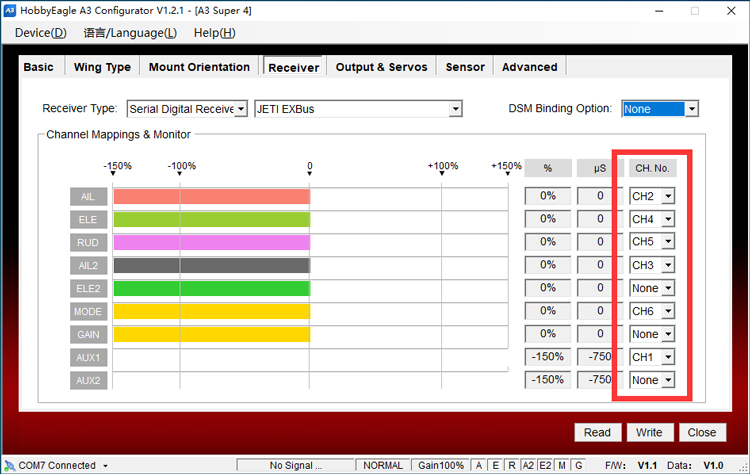
Change the receiver type of the gyro to "Serial Digital Receiver->JETI EXBus" mode via the configurator or program card. Setup the channel mapping to match the channel order of the transmitter, then restart the gyro to make the new settings take effect.