

A3 EVO是一款航模固定翼专用6轴陀螺仪,采用STM32平台开发,算法简洁、高效、成熟、稳定,支持PWM、PPM、SBus和CRSF① 串行接收机,独立的3轴基础感度调节,以及为迷你接收机提供了独立的油门输出通道等。A3 EVO将为您带来更加强大和出色的性能。
产品特性
- 4种飞行模式: 陀螺仪关闭模式、普通增稳模式、自动平衡模式、自动吊机模式;
- 3种翼型: 常规翼型、三角翼(飞翼)和V尾;
- 支持标准PWM接收机和PPM、SBus、CRSF① 串行接收机;
- 为单线接收机提供油门输出通道;
- 独立的副翼、升降、方向基础感度调节;
- 远程总感度调节。
① CRSF为固件V2.0新增功能
飞行模式
A3 EVO共有4种飞行模式,使用一个三段式开关可以在飞行中进行切换,您可以通过观察LED的颜色判断当前的飞行模式,如下表:
 |
蓝灯常亮 | 普通增稳模式(NORMAL Mode) |
 |
红灯常亮 | 自动平衡模式(LEVEL Mode) |
 |
红蓝灯常亮 | 自动吊机模式(HOVER Mode) |
 |
LED熄灭 | 陀螺仪关闭模式(GYRO OFF Mode) |
设置菜单的第7项提供了4种固定的模式组合,出厂默认为模式-1,即 "普通模式 – 自动平衡 – 自动吊机",如下表:
| 模式编号 | 开关位置-1 | 开关位置-2 | 开关位置-3 |
|---|---|---|---|
| 模式-1 * | 普通增稳 | 自动平衡 | 自动吊机 |
| 模式-2 | 普通增稳 | 陀螺仪关闭 | 自动平衡 |
| 模式-3 | 普通增稳 | 陀螺仪关闭 | 自动吊机 |
| 模式-4 | 自动平衡 | 陀螺仪关闭 | 自动吊机 |
陀螺仪关闭模式
陀螺仪关闭模式(GYRO OFF),当开启该模式时,陀螺仪功能将被完全禁用。飞机将完全由遥控器进行控制,没有任何修正指令会发送给舵机,该模式通常用于测试目的。
普通增稳模式
普通增稳模式(NORMAL,又称角速率模式RATE)是陀螺仪最基本的功能。它基于每个旋转轴的角速率控制。在该模式下操作时,陀螺仪只会对当前正在发生的旋转运动进行修正,当飞机围绕相应的旋转轴发生旋转时,一个瞬间的修正动作会被发送给舵机,当转动停止后,舵机将立即回到中位。普通增稳模式能有效地提高飞行的稳定性和精确度,并能降低飞机的失速点。
自动平衡模式
自动平衡模式(LEVEL,又称水平模式HORIZON),一旦松开摇杆,飞机就会自动恢复到水平位置。自动平衡模式下没有倾角限制,飞机只会在副翼或升降摇杆回中时受到平衡牵制作用而恢复水平,而操作摇杆时飞机还可以像普通模式那样进行正常飞行,自动平衡模式可以用来防止飞行员因迷失方向而导致摔机。
自动吊机模式
自动吊机模式(HOVER)跟自动平衡模式类似,所不同的是当松开摇杆时,飞机不是恢复水平而是保持机头朝上的吊机姿态。这种模式可以用来帮助您学习吊机动作,也可以用来做吊机表演。
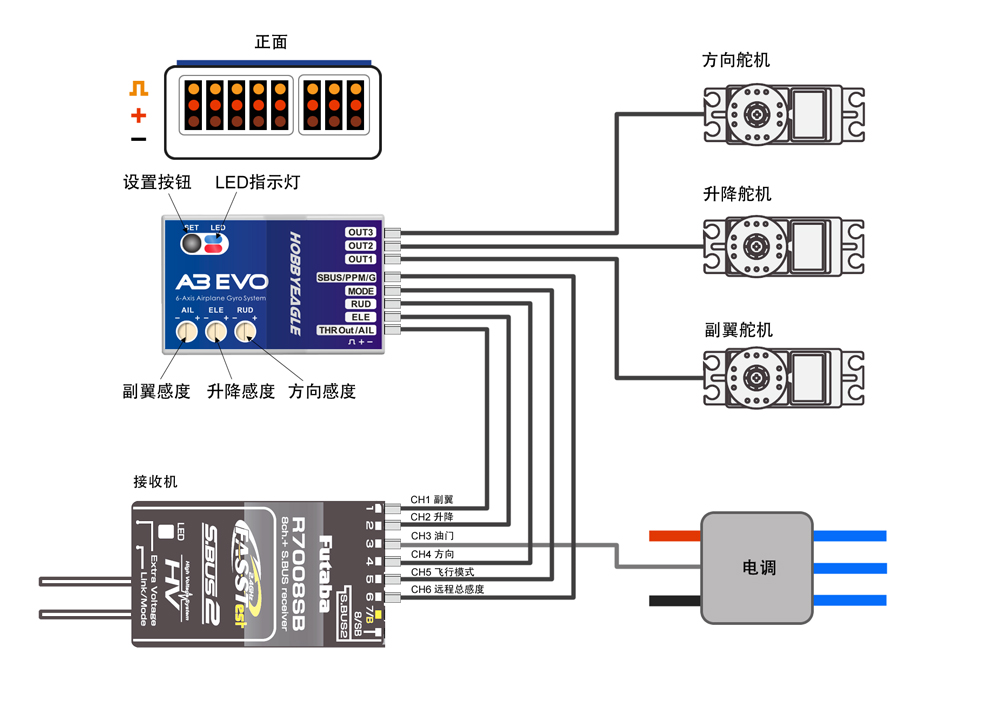
标准PWM接收机连接示例
注意事项:
- [MODE] 是飞行模式控制通道,使用遥控器上的一个三段式开关通道进行飞行模式切换;
- [SBUS/PPM/G] 是远程总感度控制通道,可以使用遥控器上的一个旋钮或拨杆在飞行中进行远程总感度的线性调节,也可以使用一个三段式开关进行总感度的切换;
- 电调或油门舵机直接接到接收机的油门通道,不需要经过陀螺仪;
- 连线时注意信号线的极性,避免插反,无论是输入还是输出通道,橙色的信号线都是朝上的。
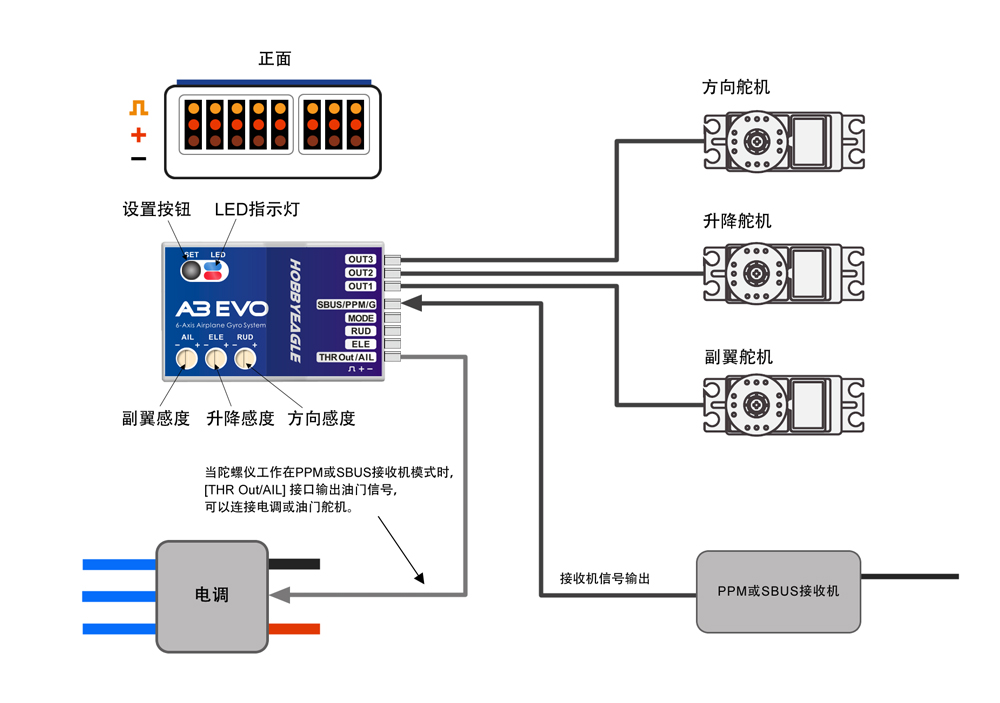
单线接收机连接示例
A3 EVO 支持 PPM、SBus和CRSF① 串行接收机单线连接,如果您使用这些接收机,只需要将接收机的输出信号连接到陀螺仪的 [SBUS/PPM/G] 接口即可。使用单线接收机时,A3 EVO 会使用默认的通道顺序进行通道识别,见下表,请检查您的遥控器上的通道定义是否与 A3 EVO 的一致。使用标准 PWM 接收机时,这个通道定义表不起作用。当 A3 EVO 工作在单线接收机模式时,[THR Out/AIL]会自动输出油门通道的信号,如果您使用的是没有独立输出通道的迷你接收机,可以将电调或油门舵机连接到这个接口。
表 1:串行接收机默认通道定义表
| 接收机协议 | 副翼 | 升降 | 油门 | 方向 | 模式 | 感度 |
|---|---|---|---|---|---|---|
| PPM接收机 | CH1 | CH2 | CH3 | CH4 | CH5 | - |
| SBus - Futaba/通用 | CH1 | CH2 | CH3 | CH4 | CH5 | - |
| CRSF - TBS/ELRS① | CH1 | CH2 | CH3 | CH4 | CH5 | - |
① CRSF为固件V2.0新增功能
注意:在单线接收机模式下,远程总感度通道出厂默认是关闭的,如果您需要使用该功能,请在设置菜单的第 11 项中设置对应的通道号即可。
设置菜单
进入设置菜单
在待机状态下,按住按钮不放2秒以上当看到红蓝灯快速闪烁时松开按钮即可进入设置菜单。设置菜单包含了11个设置项目,这些项目通常情况下只需要在安装完成后设定一次即可,不需要经常更改;
选择设置项目
进入设置菜单后,红蓝灯闪烁的次数代表当前项目的编号,每隔3秒会自动切换到下一个项目,不断循环。比如,红蓝灯闪1次,表示当前是第1项"副翼陀螺仪方向设定",等待3秒,红蓝灯闪2次,表示当前是第2项"升降陀螺仪方向设定",以此类推;
更改选项值
当您到达需要的项目时,短按一次按钮进入当前设置项,进入后,LED的颜色代表当前的设置值,短按一次按钮可以切换到下一个值,修改完成后,等待大概5秒,LED会快速闪烁表示当前选定值已被自动保存并退回设置菜单;如果您不想进行修改,只需保留当前设置值并等待5秒自动退出即可。
退出菜单
在设置菜单中长按按钮2秒直到红蓝灯快速闪烁时松开按钮即可退出设置菜单,返回待机状态。
