

A3 EVO是一款航模固定翼專用6軸陀螺儀,採用STM32平台開發,算法簡潔、高效、成熟、穩定,支持PWM、PPM、SBus和CRSF① 串行接收機,獨立的3軸基礎感度調節,以及為迷你接收機提供了獨立的油門輸出通道等。A3 EVO將為您帶來更加強大和出色的性能。
產品特性
- 4種飛行模式: 陀螺儀關閉模式、普通增穩模式、自動平衡模式、自動吊機模式;
- 3種翼型: 常規翼型、三角翼(飛翼)和V尾;
- 支持標準PWM接收機和PPM、SBus、CRSF① 串行接收機;
- 為單線接收機提供油門輸出通道;
- 獨立的副翼、升降、方向基礎感度調節;
- 遠程總感度調節。
① CRSF為韌體V2.0新增功能
飛行模式
A3 EVO共有4種飛行模式,使用一個三段式開關可以在飛行中進行切換,您可以通過觀察LED的顏色判斷當前的飛行模式,如下表:
 |
藍燈常亮 | 普通增穩模式(NORMAL Mode) |
 |
紅燈常亮 | 自動平衡模式(LEVEL Mode) |
 |
紅藍燈常亮 | 自動吊機模式(HOVER Mode) |
 |
LED熄滅 | 陀螺儀關閉模式(GYRO OFF Mode) |
設置菜單的第7項提供了4種固定的模式組合,出廠默認為模式-1,即 "普通模式 – 自動平衡 – 自動吊機",如下表:
| 模式編號 | 開關位置-1 | 開關位置-2 | 開關位置-3 |
|---|---|---|---|
| 模式-1 * | 普通增穩 | 自動平衡 | 自動吊機 |
| 模式-2 | 普通增穩 | 陀螺儀關閉 | 自動平衡 |
| 模式-3 | 普通增穩 | 陀螺儀關閉 | 自動吊機 |
| 模式-4 | 自動平衡 | 陀螺儀關閉 | 自動吊機 |
陀螺儀關閉模式
陀螺儀關閉模式(GYRO OFF),當開啟該模式時,陀螺儀功能將被完全禁用。飛機將完全由遙控器進行控制,沒有任何修正指令會發送給舵機,該模式通常用於測試目的。
普通增穩模式
普通增穩模式(NORMAL,又稱角速率模式RATE)是陀螺儀最基本的功能。它基於每個旋轉軸的角速率控制。在該模式下操作時,陀螺儀只會對當前正在發生的旋轉運動進行修正,當飛機圍繞相應的旋轉軸發生旋轉時,一個瞬間的修正動作會被發送給舵機,當轉動停止後,舵機會立即回到中位。普通增穩模式能有效地提高飛行的穩定性和精確度,並能降低飛機的失速點。
自動平衡模式
自動平衡模式(LEVEL,又稱水平模式HORIZON),一旦鬆開搖桿,飛機就會自動恢復到水平位置。自動平衡模式下沒有傾角限制,飛機只會在副翼或升降搖桿回中時受到平衡牽制作用而恢復水平,而操作搖桿時飛機還可以像普通模式那樣進行正常飛行,自動平衡模式可以用來防止飛行員因迷失方向而導致摔機。
自動吊機模式
自動吊機模式(HOVER)跟自動平衡模式類似,所不同的是當鬆開搖桿時,飛機不是恢復水平而是保持機頭朝上的吊機狀態。這種模式可以用來幫助您學習吊機動作,也可以用來做吊機表演。
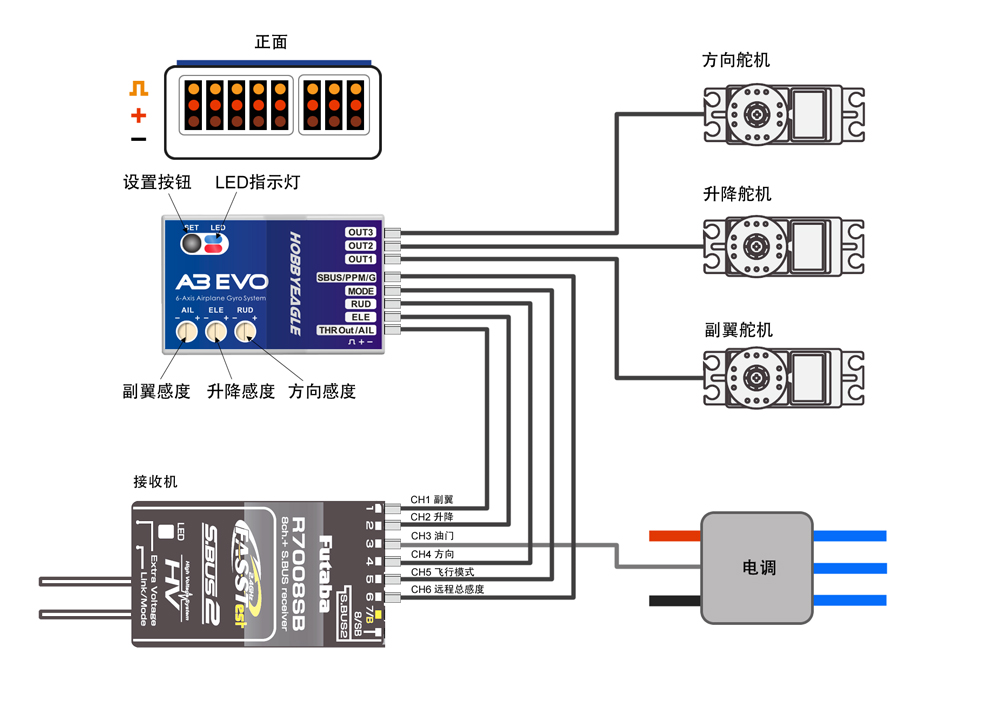
標準PWM接收機連接示例
注意事項:
- [MODE] 是飛行模式控制通道,使用遙控器上的一個三段式開關通道進行飛行模式切換;
- [SBUS/PPM/G] 是遠程總感度控制通道,可以使用遙控器上的一個旋鈕或撥桿在飛行中進行遠程總感度的線性調節,也可以使用一個三段式開關進行總感度的切換;
- 電調或油門舵機直接接到接收機的油門通道,不需要經過陀螺儀;
- 連線時注意信號線的極性,避免插反,無論是輸入還是輸出通道,橙色的信號線都是朝上的。
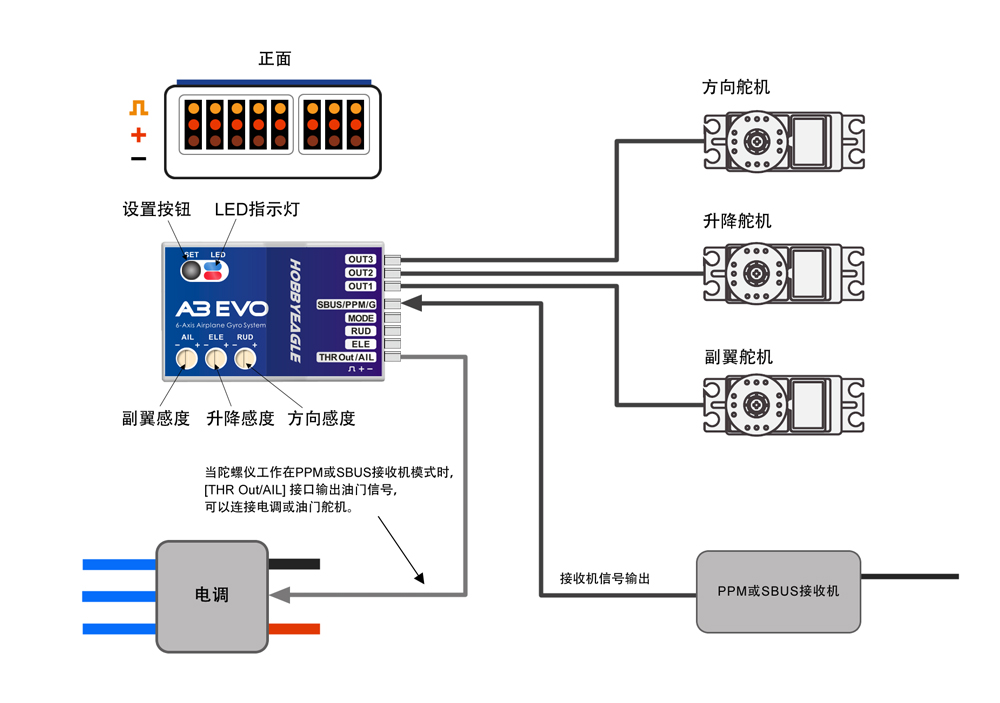
單線接收機連接示例
A3 EVO 支持 PPM、SBus和CRSF① 串行接收機單線連接,如果您使用這些接收機,只需要將接收機的輸出信號連接到陀螺儀的 [SBUS/PPM/G]接口即可。使用單線接收機時,A3 EVO 會使用默認的通道順序進行通道識別,見下表,請檢查您的遙控器上的通道定義是否與 A3 EVO 的一致。使用標準 PWM 接收機時,這個通道定義表不起作用。當 A3 EVO 工作在單線接收機模式時,[THR Out/AIL] 會自動輸出油門通道的信號,如果您使用的是沒有獨立輸出通道的迷你接收機,可以將電調或油門舵機連接到這個接口。
表 1:串行接收機默認通道定義表
| 接收機協議 | 副翼 | 升降 | 油門 | 方向 | 模式 | 感度 |
|---|---|---|---|---|---|---|
| PPM接收機 | CH1 | CH2 | CH3 | CH4 | CH5 | - |
| SBus - Futaba/通用 | CH1 | CH2 | CH3 | CH4 | CH5 | - |
| CRSF - TBS/ELRS① | CH1 | CH2 | CH3 | CH4 | CH5 | - |
① CRSF為韌體V2.0新增功能
注意,在單線接收機模式下,遠程總感度通道出廠默認是關閉的,如果您需要使用該功能,請在設置菜單的第11項中設置對應的通道號即可。
设置菜单
进入设置菜单
在待機狀態下,按住按鈕不放2秒以上當看到紅藍燈快速閃爍時鬆開按鈕即可進入設置菜單。設置菜單包含了11個設置項目,這些項目通常情況下只需要在安裝完成後設定一次即可,不需要經常更改;
选择设置项目
進入設置菜單後,紅藍燈閃爍的次數代表當前項目的編號,每隔3秒會自動切換到下一個項目,不斷循環。比如,紅藍燈閃1次,表示當前是第1項"副翼陀螺儀方向設定",等待3秒,紅藍燈閃2次,表示當前是第2項"升降陀螺儀方向設定",以此類推;
更改选项值
當您到達需要的項目時,短按一次按鈕進入當前設置項,進入後,LED的顏色代表當前的設置值,短按一次按鈕可以切換到下一個值,修改完成後,等待大概5秒,LED會快速閃爍表示當前選定值已被自動保存並退回設置菜單;如果您不想進行修改,只需保留當前設置值並等待5秒自動退出即可。
退出菜单
在設置菜單中長按按鈕2秒直到紅藍燈快速閃爍時鬆開按鈕即可退出設置菜單,返回待機狀態。
